
今回は、ダンピング抵抗のお話です。
前回はレシーバ入力端のオーバーシュートとアンダーシュートを抑制するために、ドライバ出力側にダンピング抵抗を追加する方法を話した。今回は、ダンピング抵抗を追加したときの回路図、立上り時の格子線図と、ドライバ側とレシーバ側の電圧の時間的変化を図で示そう。

昇平博士、ダンピング抵抗Rdの定数はどのように選ぶのですか??
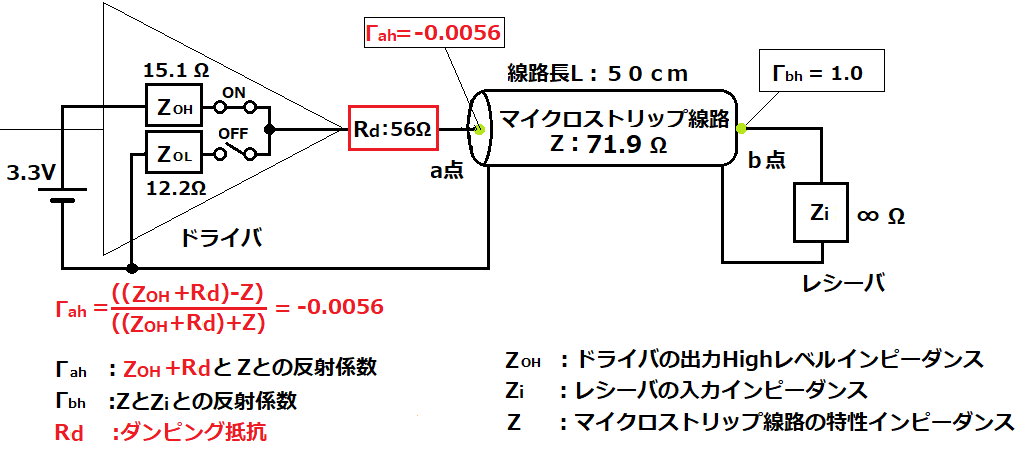
おおっ、なみりんいい質問だ。ZOH+Rd = Zを満足できるRdを探すのじゃ。。
ここでは特性インピーダンスZ:71.9Ωに合わせるために、出力インピーダンスZOH:15.1Ωからダンピング抵抗Rd:56Ωで整合を取るのですね。あらっ!? A点の反射係数Γahの絶対量が大幅に減ったわ。ダンピング抵抗がないときは0.653だったわ。(#061 EMI対策 ~伝送線路4(オーバーシュート)~ 参照) ダンピング抵抗の配置にも決まりがあるんですか??
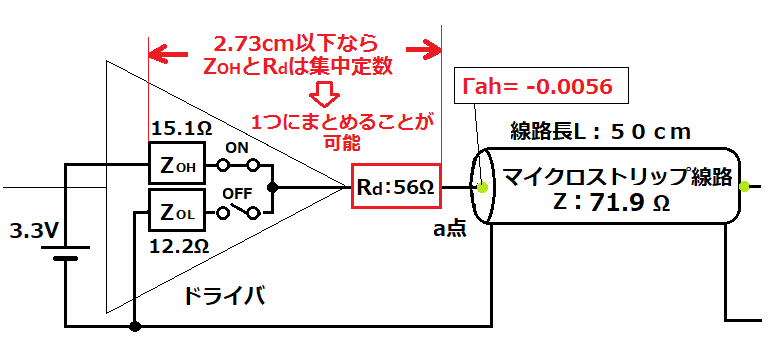
ダンピング抵抗の配置は、ドライバの出力インピーダンスとダンピング抵抗が、集中定数として扱える距離間でないとダメなんじゃ。ここではZOHから線路長2.73cmまでの間にダンピング抵抗Rdを配置するのがBESTじゃ。 (#058 EMI対策 ~伝送線路2 (分布定数と集中定数) ~ 参照)
下図はダンピング抵抗を追加したときの立上りの格子線図を示しておる。 Γahがゼロ(反射がない)なので、b点側もオーバーシュートがなくなっておる。
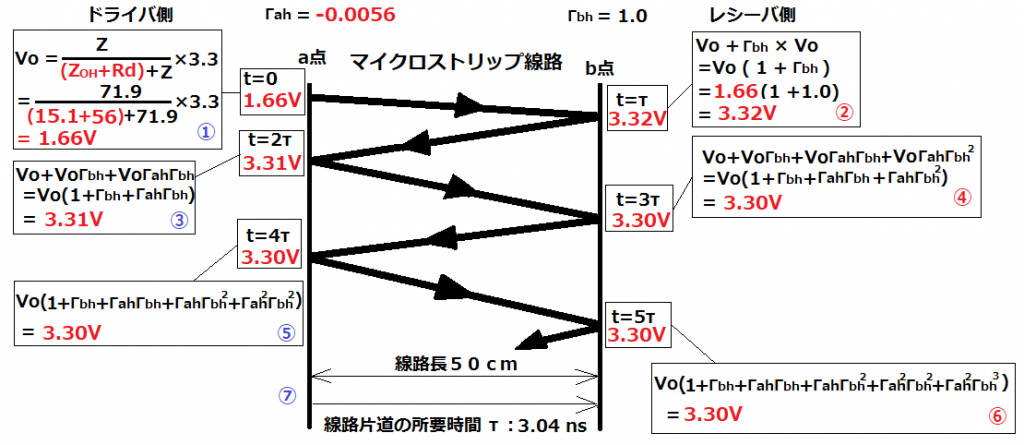
b点は立ち上がって、すぐに3.3Vに落ち着いているわー。
最後に時間軸上でa点とb点の電圧変化を下図に示そう。
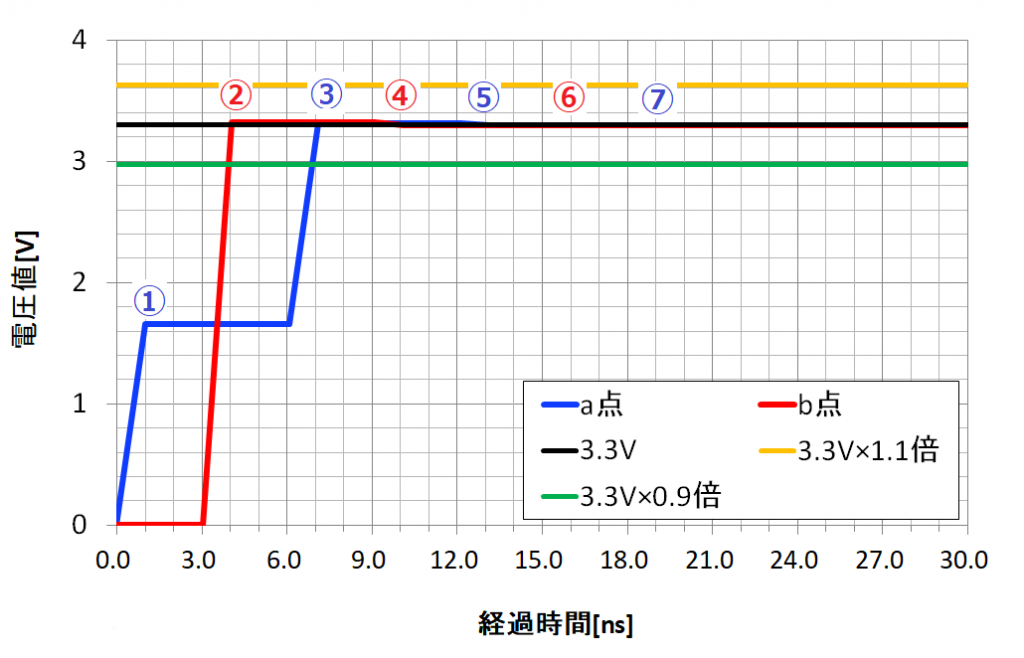
あっ、オーバーシュートが消えました。 昇平博士、ダンピング抵抗を入れた立下りのBergeron図は、どんな感じになるのですか?
立下り波形のBergeron図は次回にお話しよう。
次回も、引き続きダンピング抵抗のお話です。